
工业机器人运动学标定与轨迹规划虚拟仿真实验原理
一、实验总体原理
本虚拟仿真实验以工业机器人串联连杆运动学模型为基础,先通过运动学标定修正机器人几何参数误差,再基于精确模型进行关节空间/笛卡尔空间轨迹规划,最终在虚拟平台上实现高精度、平滑、无碰撞的运动仿真,完成从“建模—标定—规划—仿真验证”的完整闭环。
二、工业机器人运动学建模原理
1.文字原理
工业机器人通常为串联多刚体连杆机构,采用D-H 参数法(Denavit-Hartenberg) 建立连杆坐标系。
定义4个D-H参数:连杆长度a、连杆扭角α、连杆偏距d、关节转角 θ。
通过齐次变换矩阵逐连杆相乘,得到正运动学方程:
已知末端位姿求解关节角,为逆运动学,是轨迹规划的基础。
三、运动学标定原理
1.文字原理
运动学标定的核心是辨识并修正 D-H 参数误差,减小定位误差。
误差来源:加工装配误差、减速器间隙、连杆弹性变形、零位偏差等,导致名义模型与实际模型不一致。
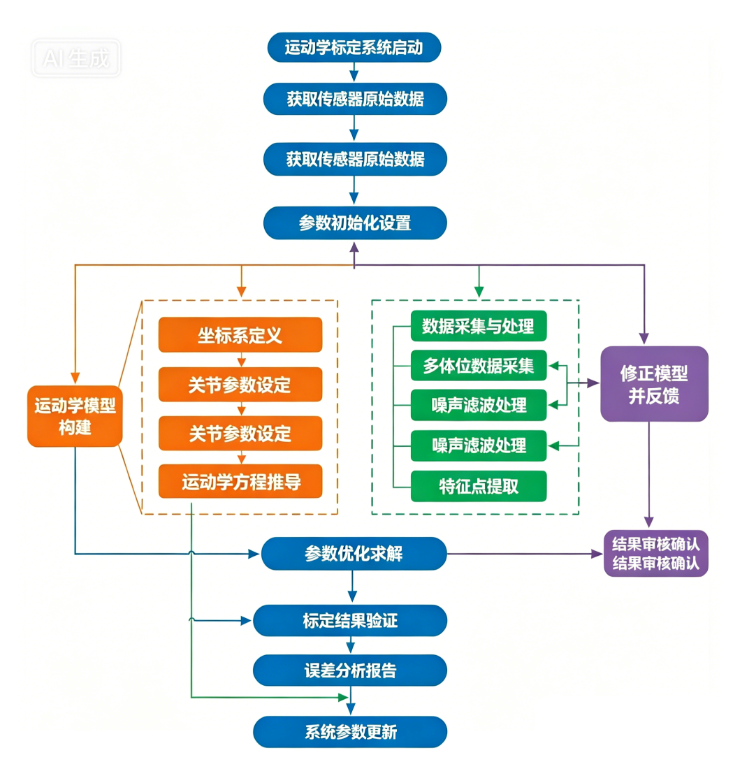
标定流程:
测量机器人末端实际位姿;
建立误差模型,计算名义位姿与实际位姿偏差;
通过最小二乘法 / 卡尔曼滤波辨识参数误差;
修正 D-H 参数,完成误差补偿。
虚拟仿真中通过设定 “名义模型→误差注入→测量→辨识→补偿” 流程复现标定全过程。
2.示意图